Tagged: Report
240824_オムニホイール走行抵抗の計測
この記事は2024年8月24日にチーム内Wikiに書かれたレポートを転記したものです.
240824_オムニホイール走行抵抗の計測
目的
加速度指令からホイールごとの推力を計算してFF指令として加算する方式を検討中。
オムニホイールの転がり摩擦(おそらくサブホイールによる)の影響が意外と大きい気がしたので確認する。
結果
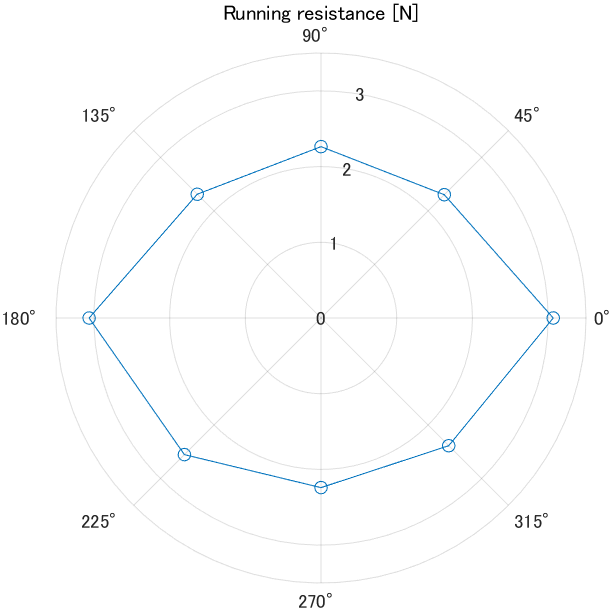
速度0.5m/sにおいて2-3N程度の走行抵抗があることを確認。
前後方向の走行抵抗は,左右方向に対して小さいことがわかる。
計測方法
ホイールごとの速度制御を行い,
速度指令を0.5m/sに設定。方向は0degから45deg刻みで360deg分実施した。
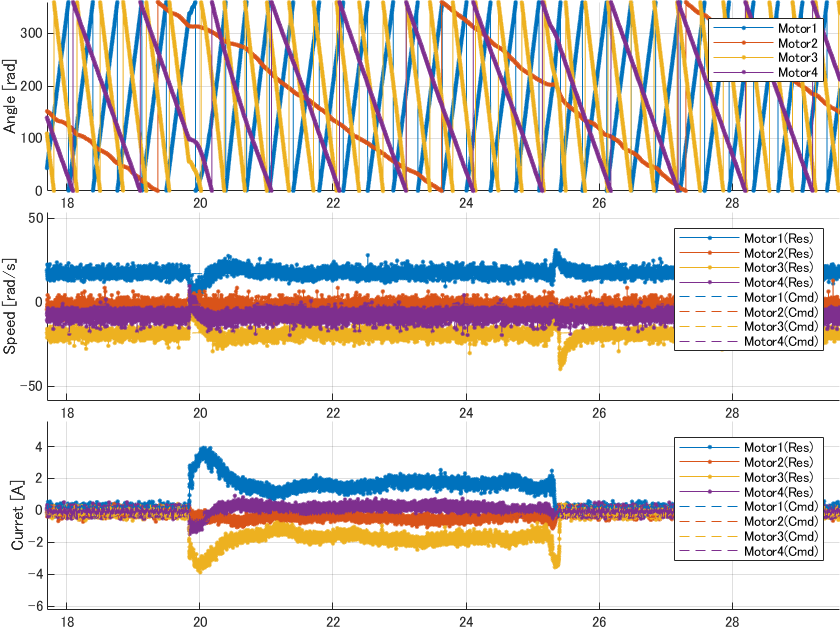
モータ電流を計測し,各モータの電流値からロボット推力を計算し,XY平面におけるノルムを計算した。
下:45deg方向へ走行時のモータ状態量,定常状態と思われる22s-24sの区間の平均値を利用。
Read more
230909_TL-WR902AC無線通信遅延計測実験
この記事は2023年9月9日にチーム内Wikiに書かれたレポートを転記したものです.
230617_無線通信遅延計測実験の続き
230909_TL-WR902AC無線通信遅延計測実験
TL-WR902ACとTP-LINK Archer C5400を用いてBroadcastで遅延時間を計測する実験を行った
評価方法
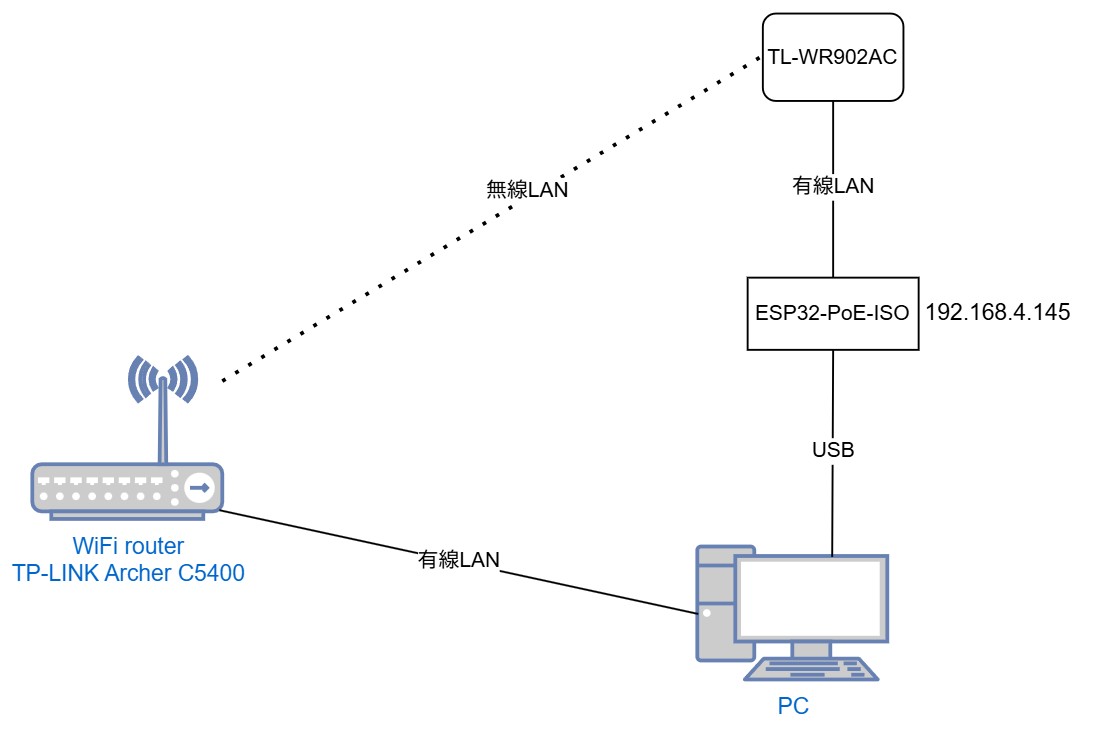
WiFiルーターと有線LANで接続したPCから,WiFiで接続されているTL-WR902ACに対してbroadcastでパケットを送信する.TL-WR902ACからESP32-PoE-ISOにEthernetで接続し,USB-Serialに出力されるまでの時間を計測した.パケットの送信間隔は10msに設定した.
評価システム図
測定方法
Broadcast
遅延測定ツールのパケット宛先を192.168.4.255にして測定
試験結果
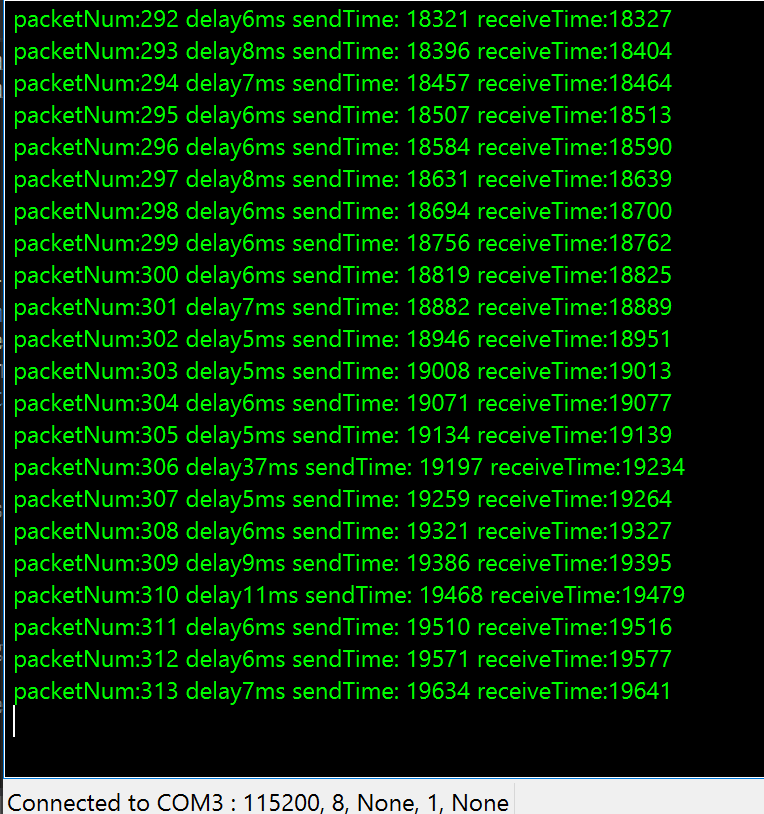
Broadcast
およそ5-15msの遅延
測定結果
Broadcast
結論
WioTerminalのBroadcastの遅延が大きいのはWioTerminalのライブラリが悪い
Read more
240126_キッカー基板v3.2試作品_充放電テスト
この記事は2024年1月26日にチーム内Wikiに書かれたレポートを転記したものです.
目的
キッカー基板v3.2試作品の充放電動作を確認する。
結果
充電動作について,シャント抵抗(R14,R15)を5mΩに設定した場合では12秒程度で200Vまで充電することを確認。
シャント抵抗を3mΩに設定した場合は300ミリ秒で130V程度に達し,充電が停止した。
放電はストレート用,チップ用ともに正常に動作した。
充電テスト
方法
充電回路(昇圧回路)の各部の波形を観測する。
- R14に5mΩシャント抵抗を実装,R15は未実装。充電停止電圧が200V程度になるようにR16, R17を調整。
- 充電時の波形を観測。
- R14を3mΩに変更。
- 充電時の波形を観測
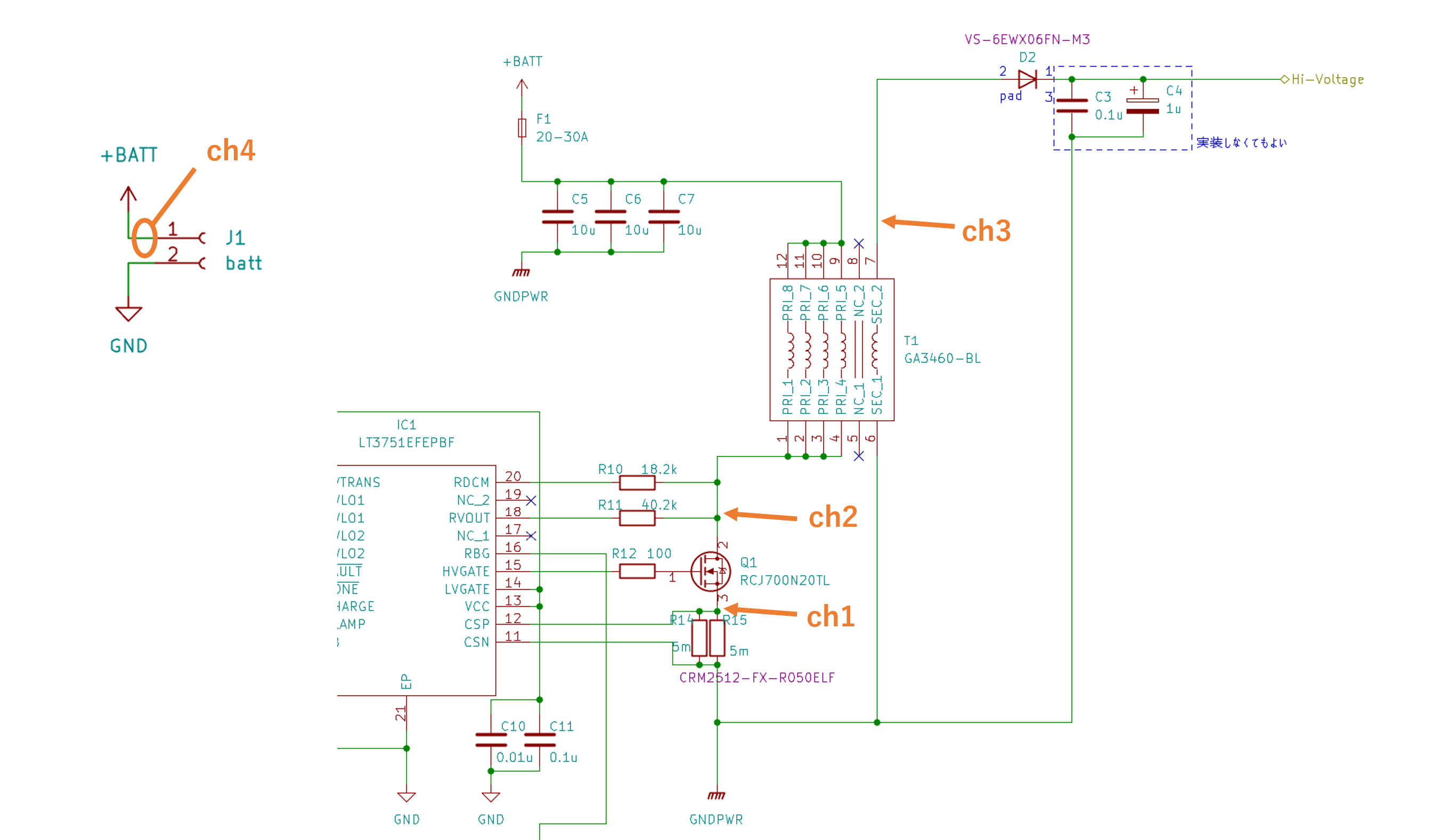
プロービング
- CH1: シャント抵抗(R14,R15)端子間電圧
- CH2: MOSFET(Q1)ドレイン電圧
- CH3: トランス2次側電圧
- CH4: 電源電流
実験結果
シャント抵抗5mΩ設定時
シャント抵抗3mΩ設定時

放電テスト
方法
放電回路(IGBT)の各部の波形を観測する。
- R16, R17は十分に小さく設定し,R14に5mΩを実装,R15は未実装。
- キャパシタ電圧が100V, 150V, 200Vに達した時に手動で充電を停止する。
- マイコンからゲート信号をONにして,放電動作させる。
- 十分時間が経過した後にゲート信号をOFFにする。
プロービング
- CH1: IGBTゲート電圧
- CH2: IGBTコレクタ電圧
- CH3: キャパシタ電圧
- CH4: コイル電流
チップキック側回路。ストレート側も同様。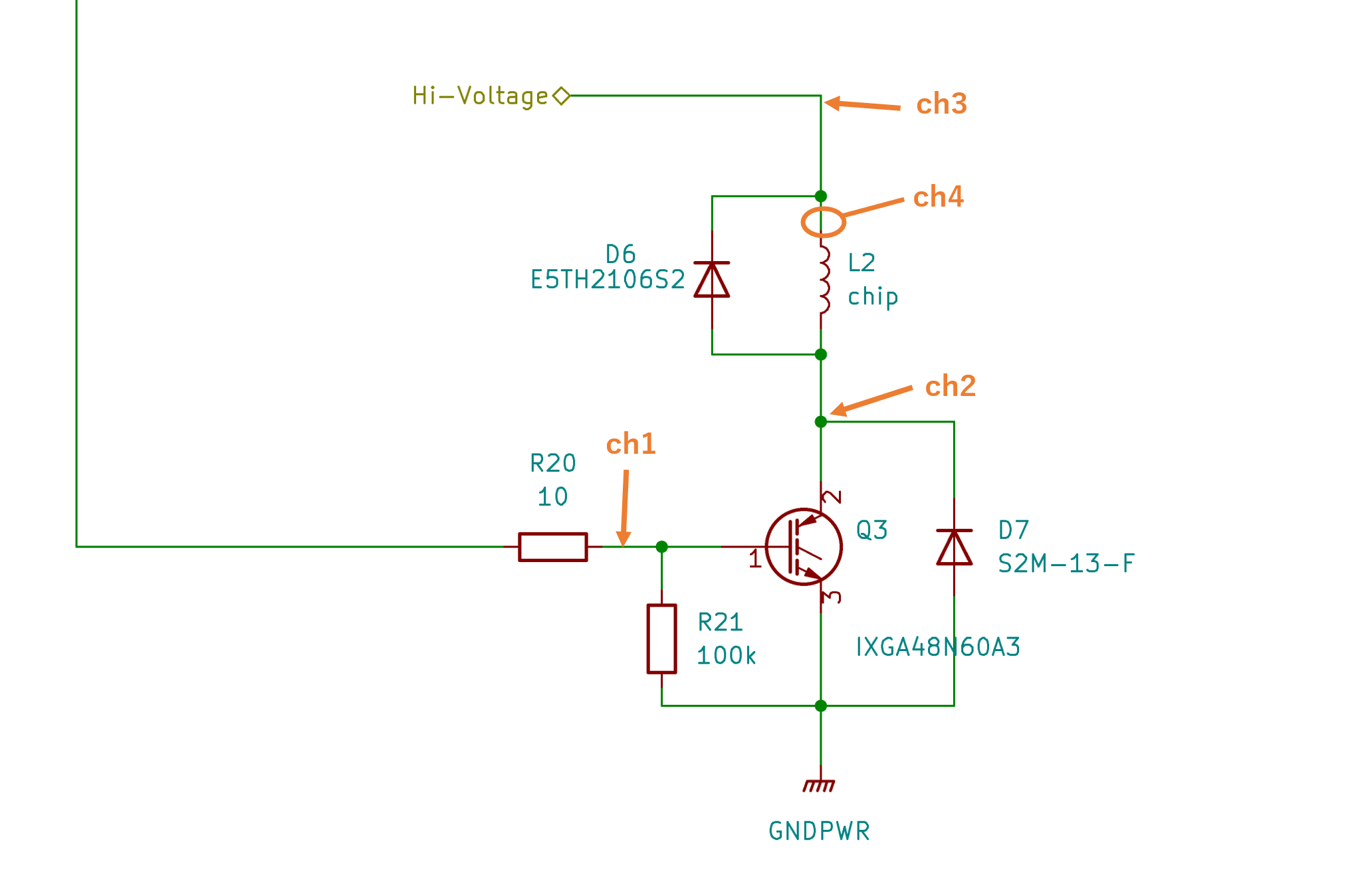
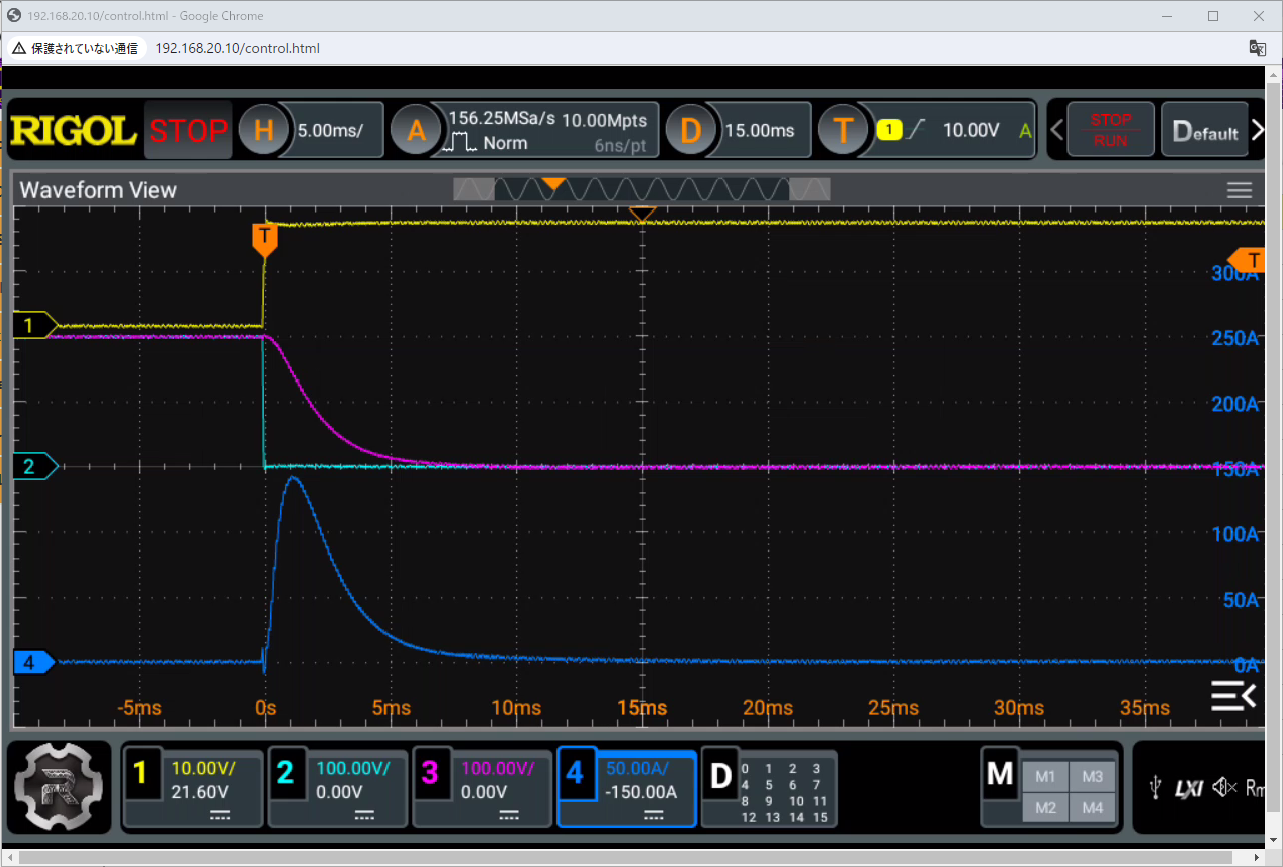
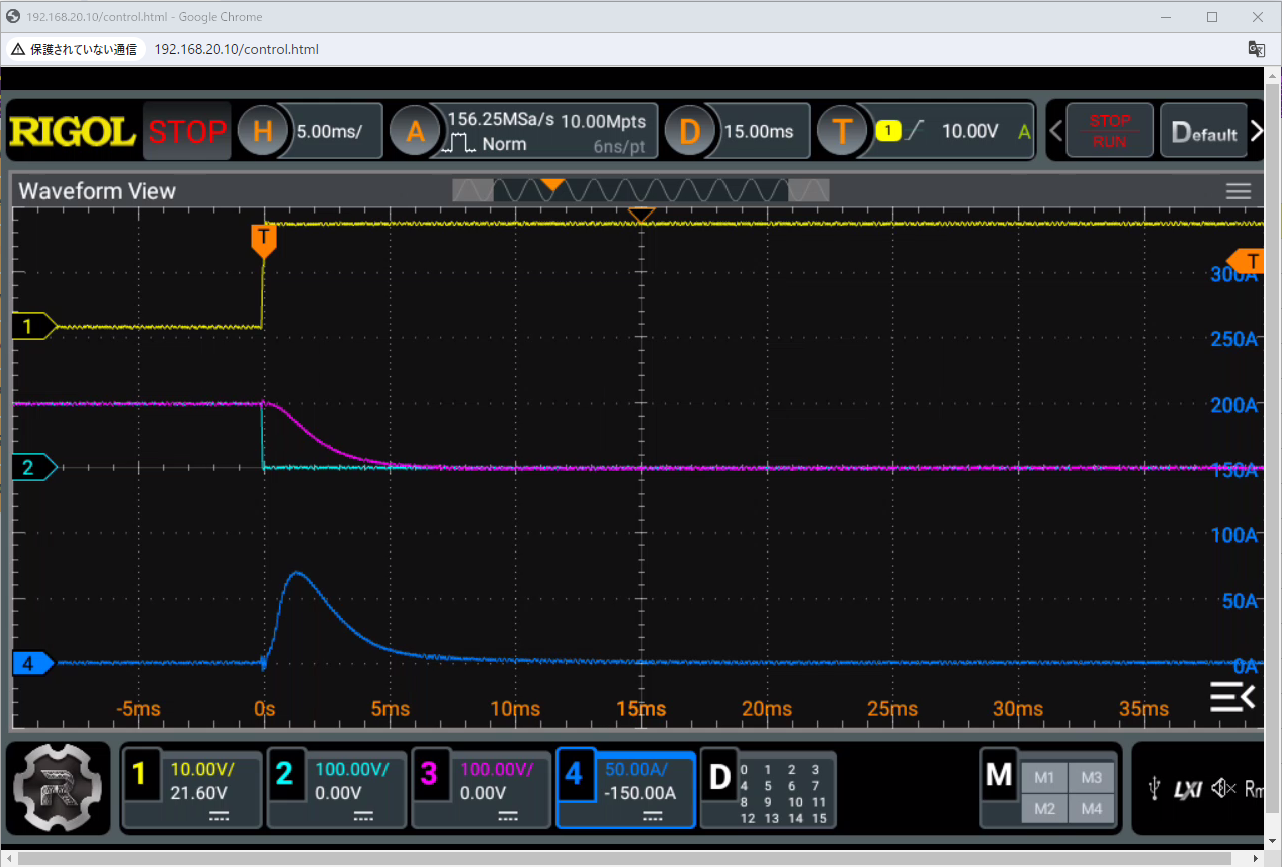
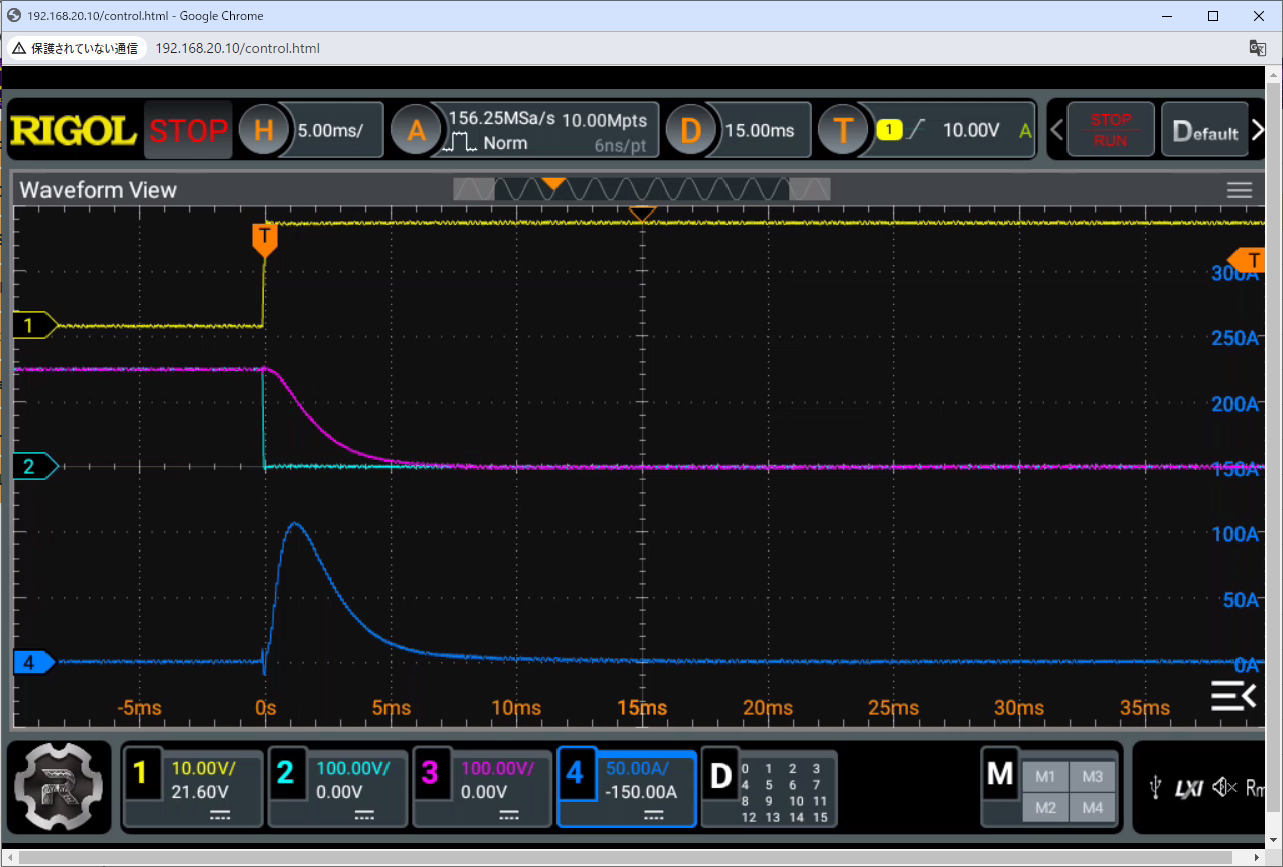
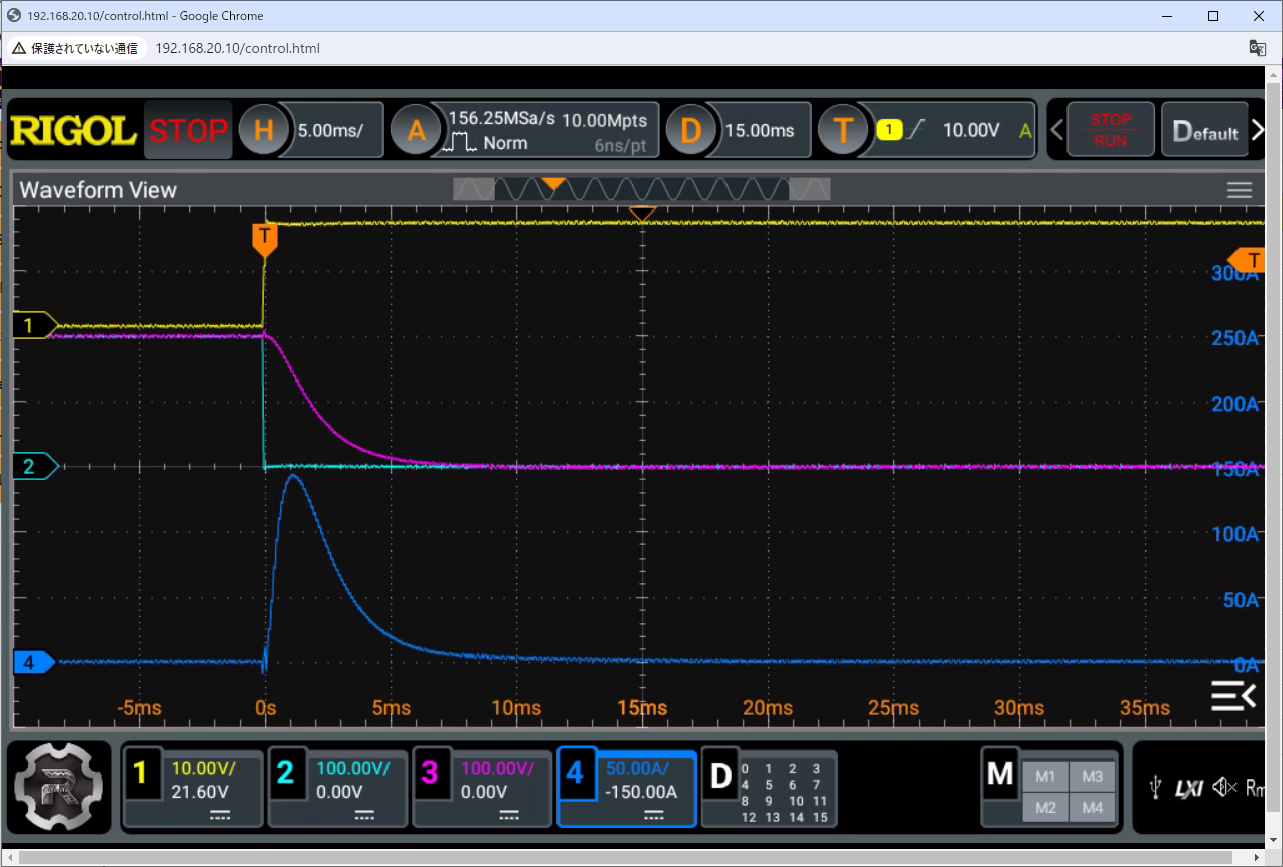
実験結果
ストレート側
キャパシタ電圧:100V

キャパシタ電圧:150V
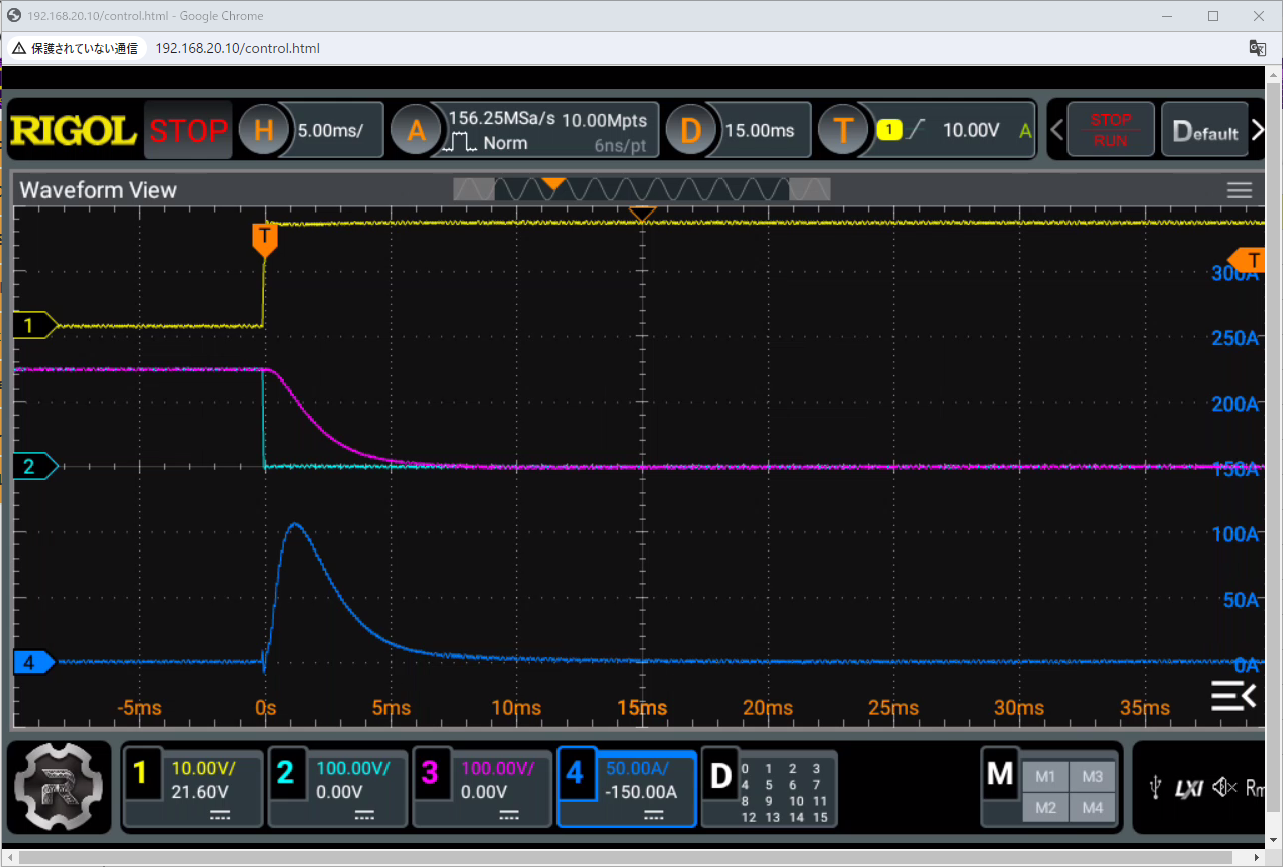
キャパシタ電圧:200V
チップ側
キャパシタ電圧:100V
キャパシタ電圧:150V
キャパシタ電圧:200V
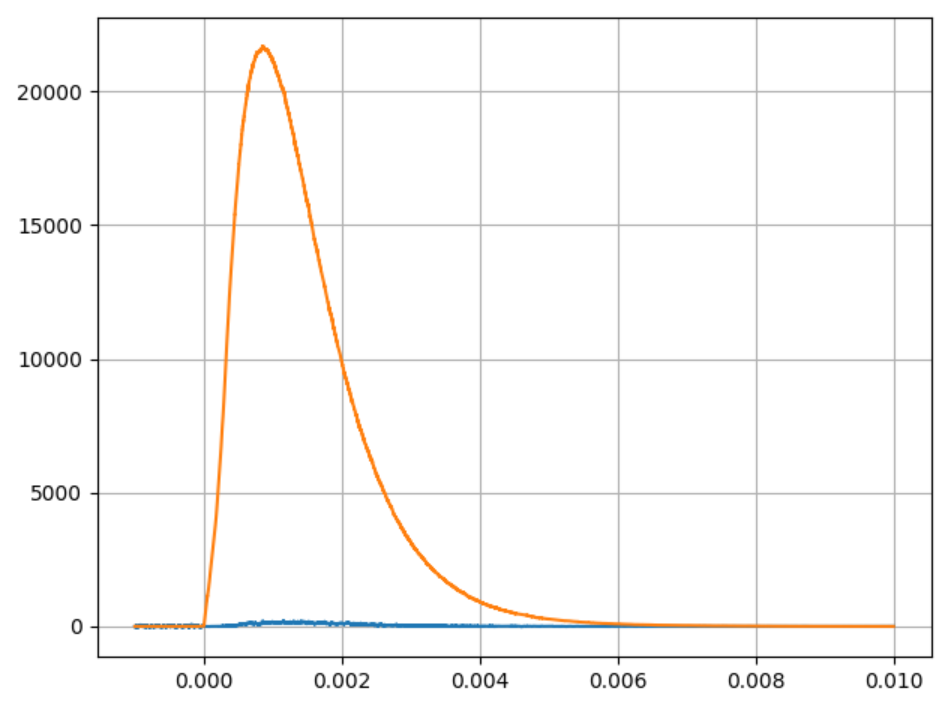
損失計算
ストレート側,200V条件の波形データからスイッチング時における各部の損失を計算した。
計算結果は以下の通り。
| 部品 | 損失 [J] |
|---|---|
| IGBT C-E間 | 0.27 |
| コイル | 38.38 |
| 上記合計 | 38.65 |
キャパシタに蓄えられるエネルギーは,
となり,キャパシタの容量抜けを考慮すると妥当。
参考:スイッチング時のコイルとIGBTの損失(縦軸:損失[W],横軸:時間[s])
Read more
240525_ロボット重心測定
この記事は2024年5月25日にチーム内Wikiに書かれたレポートを転記したものです.
目的
ロボットの3次元的な重心位置を計測する。
結果
2台,4種類の条件で重心を計測した。
結果は下の表の通り。
位置はボトムプレート下面、外形の円中心が基準。
右方向が+X、前方向が+Y、高さ方向が+Z,下図の通り。
リポチェッカー,ラズパイは非搭載。
| ロボット番号 | X | Y | Z |
|---|---|---|---|
| 4 | 1.1 | -8.9 | 47.0 |
| 7 | 2.1 | -8.3 | 46.5 |
| 7(リポなし) | 2.2 | -2.0 | 44.8 |
| 7(リポなし、下半分) | 0.6 | -1.4 | 26.4 |
重心計測の基準位置

測定方法
一度の計測で3次元の重心位置を得ることができないので,
2次元の重心位置を姿勢を変えて数パターン計測する。
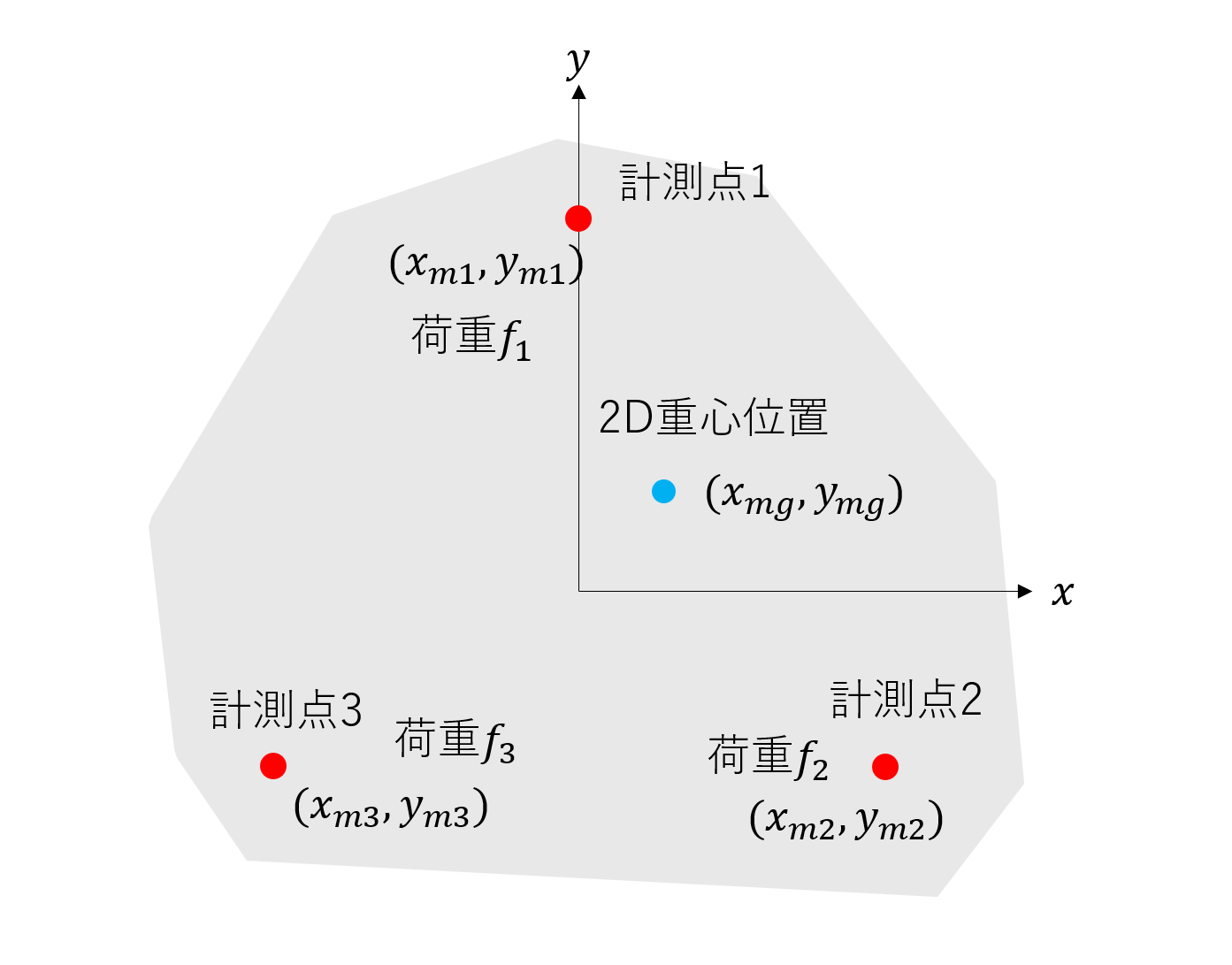
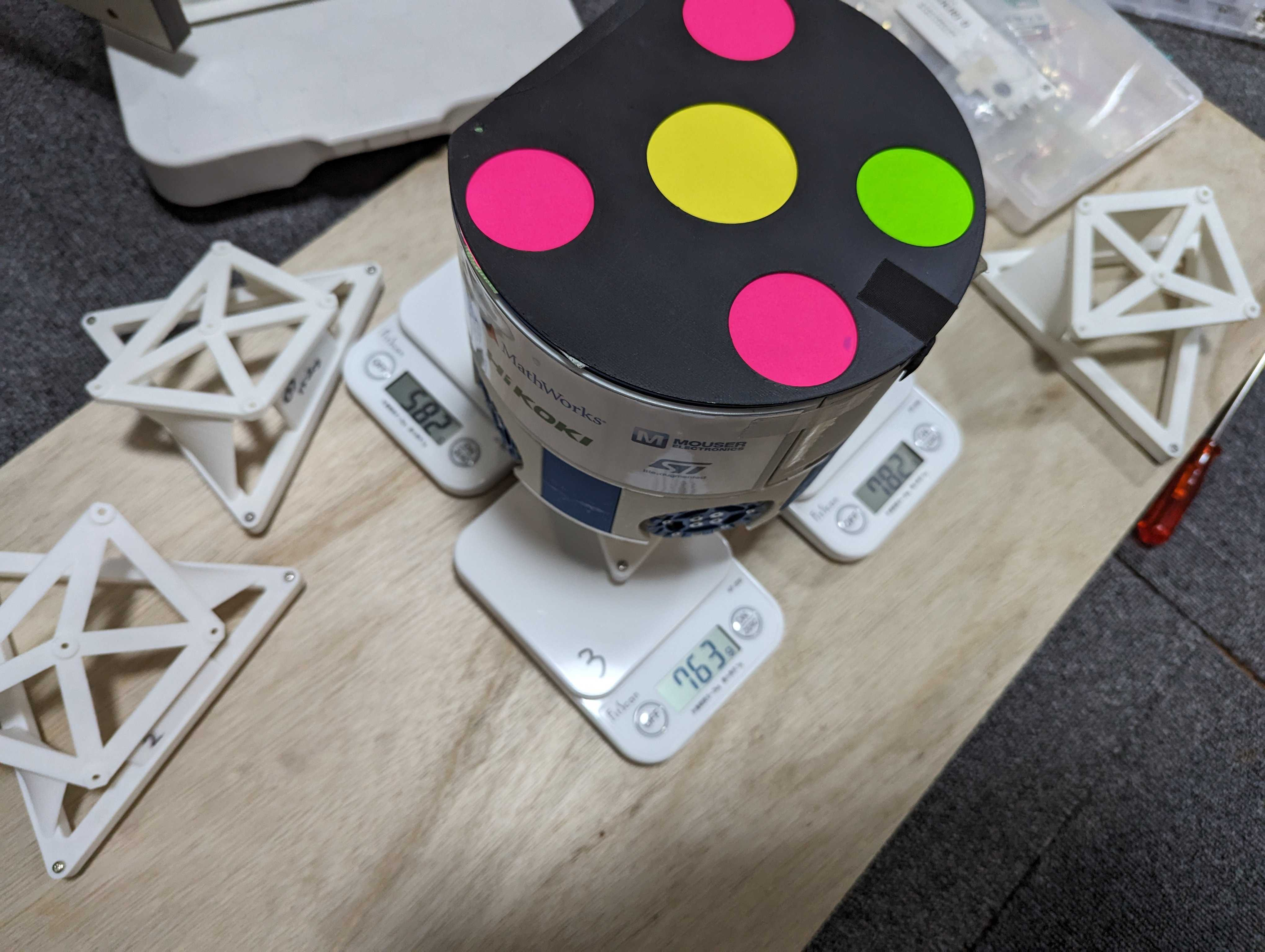
2D重心位置の計測
ロボットを3点で支え,その3点の荷重をキッチンスケールで計測する。
計測点の位置と各点の荷重から,水平面に投影された重心位置を得ることができる。
各計測点の位置関係を下図のように定義する。
各計測点の座標を
,投影された重心位置を
それぞれの荷重を
とした。
ロボットが静止していれば,X軸回り,Y軸回りのモーメントはいずれもゼロである。
したがって,
重心位置
について解けば,次の解が得られる。
これで,水平面に投影した重心位置が計測できることがわかった。
3D重心位置の計測
3次元の重心を計測するため,ロボットの姿勢を変えて2Dの重心計測をする。
各記号を以下のように定義する。
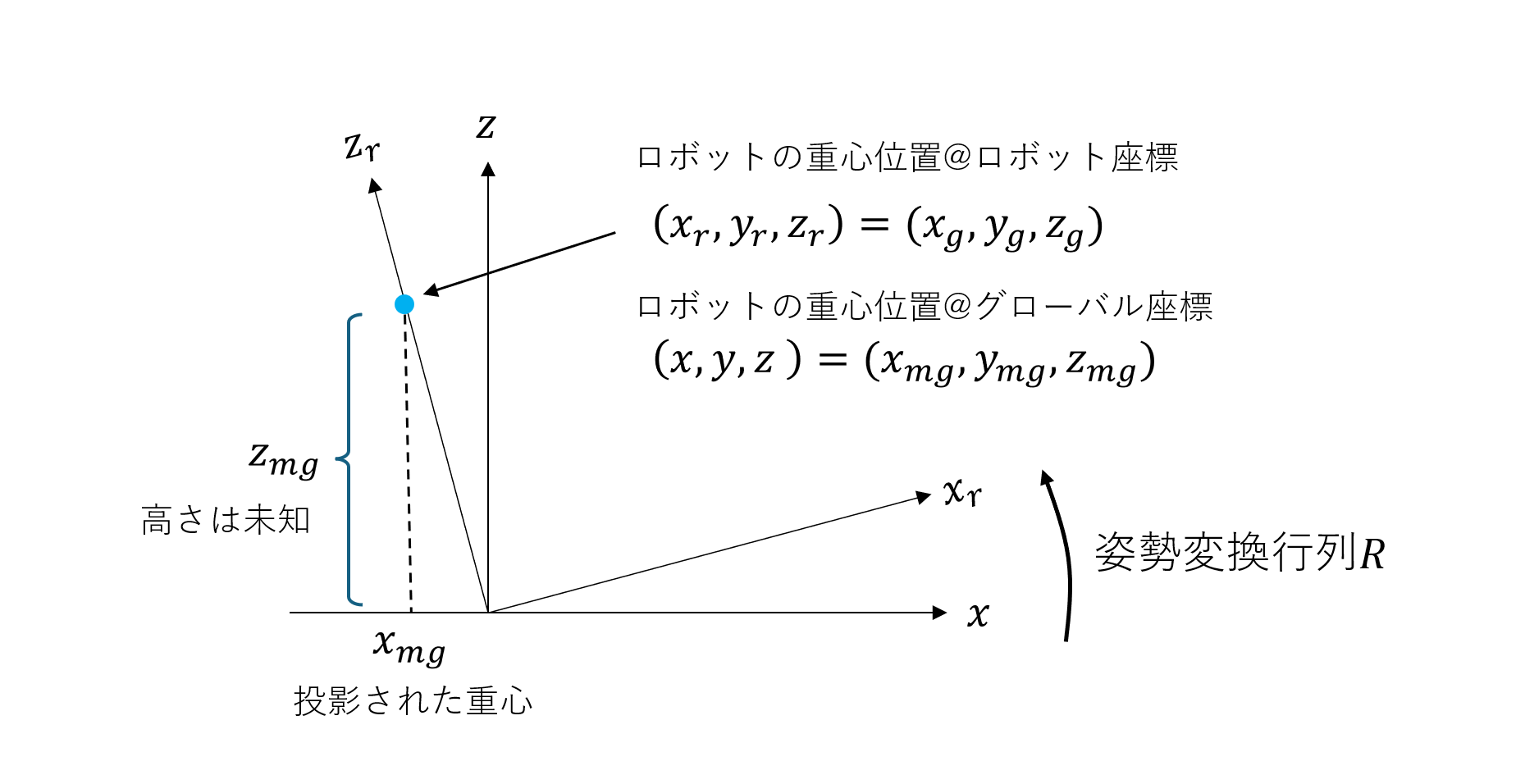
ロボットの姿勢を回転行列Rに従って回転させることで,
重心は次のように移動する。
このうち,観測できるのは
のみであるので,
観測行列Cをかけて取り出す。
これでロボットの姿勢を傾けたときの重心計測を定式化できた。
姿勢を変えた計測は数パターン行う。
Nケース計測を行うとして,この時の姿勢変換行列を
,
それぞれ計測された重心位置を
とした。
次のような線形方程式
を解くことで3次元の重心位置
を求めることができる。
明らかにMは正方行列ではないので,疑似逆行列とか特異値分解でそれらしい値を出せばいいと思う。
MATLABの場合v = M \ wとすることで,QR分解を用いたいい感じの解(たぶん最小二乗解)を出してくれる。
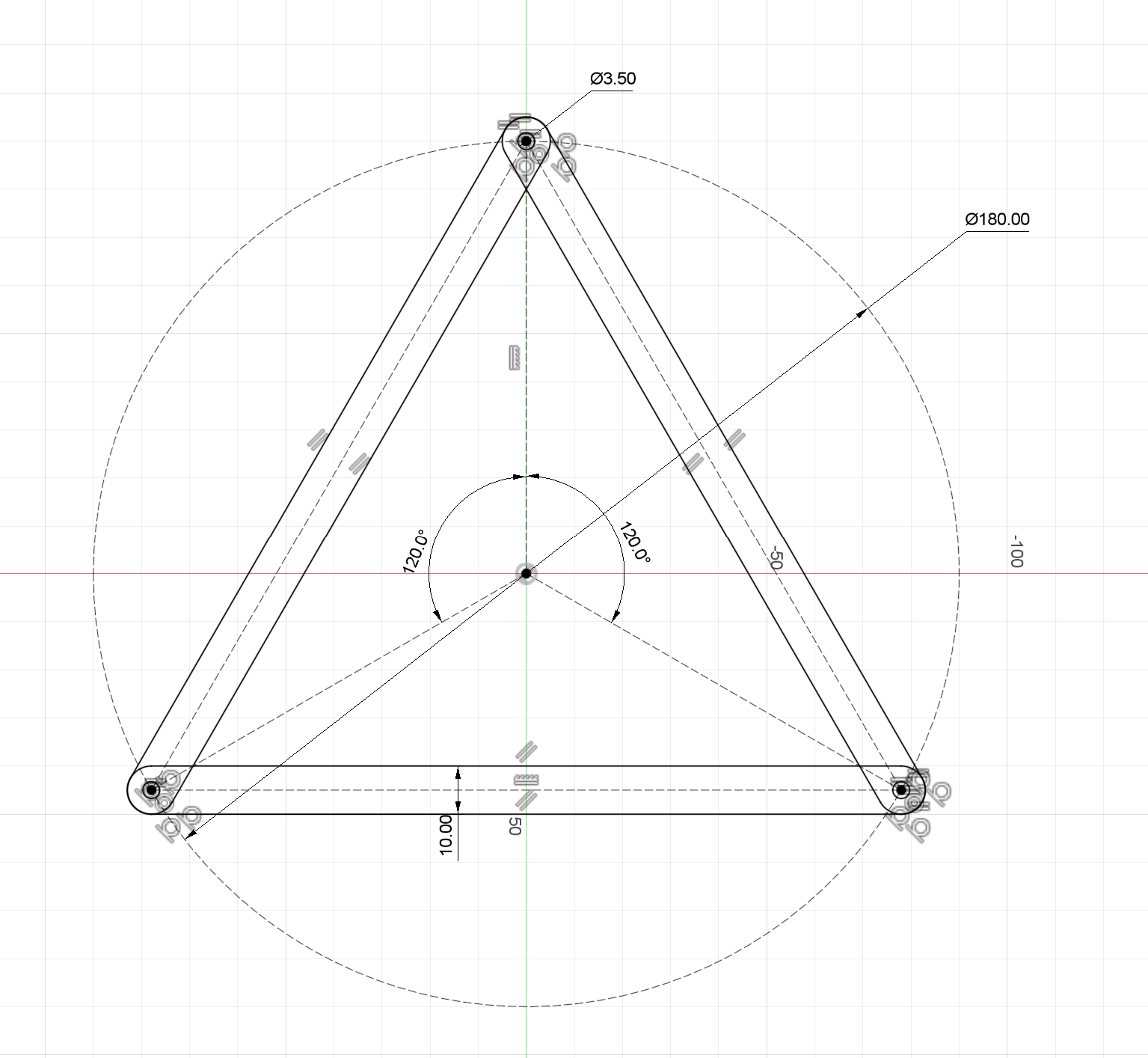
今回の測定パラメータ
計測点の配置
半径90mm,120度ごとに配置
治具の角度
オイラー角(ZYX),各軸のプラス方向から見て反時計回りを正とする
| 治具No. | Z[deg.] | Y[deg.] | X[deg.] |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 2 | 0 | 0 | 30 |
| 3 | 0 | 15 | 0 |
| 4 | 0 | 0 | -15 |
Read more

230617_無線通信遅延計測実験
この記事は2023年6月17日にチーム内Wikiに書かれたレポートを転記したものです.
230617_無線通信遅延計測実験
WioTerminalとTP-LINK Archer C5400を用いてBroadcastとUnicastでの遅延時間の差を計測する実験を行った
評価方法
WiFiルーターと有線LANで接続したPCから,WiFiで接続されているWioTerminalに対してbroadcastとunicastでパケットを送信し,それぞれの到達時間を計測した.
WioTerminalはUSBでPCと接続し,受信したパケットはpayloadのみを取り出してUSB経由でPCへと送信している.
パケットの送信間隔は15msに設定した.
評価システム図
測定方法
Broadcast
遅延測定ツールのパケット宛先を192.168.4.255にして測定
Unicast
遅延測定ツールのパケット宛先を192.168.4.145にして測定
試験結果
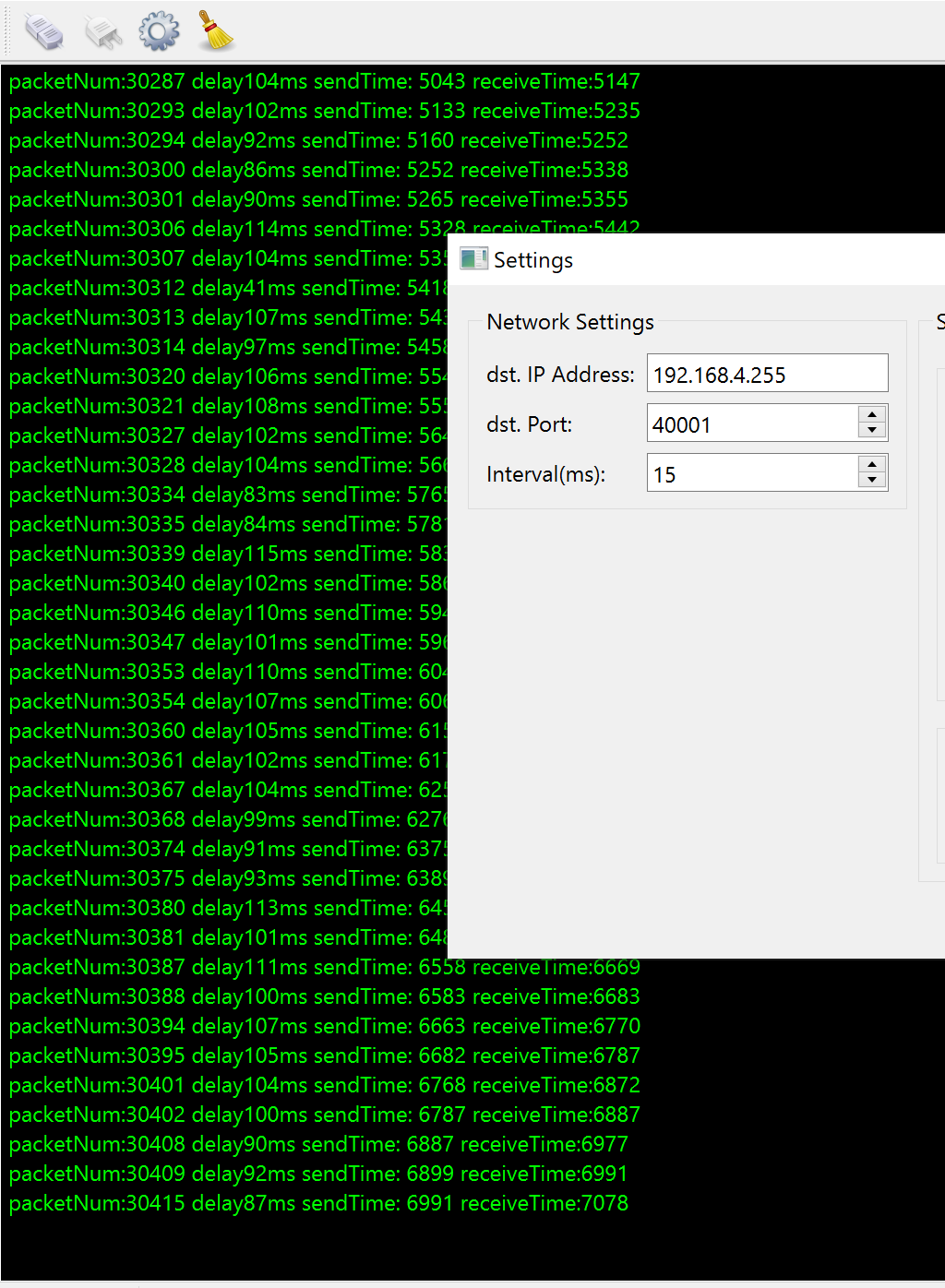
Broadcast
およそ100msの遅延
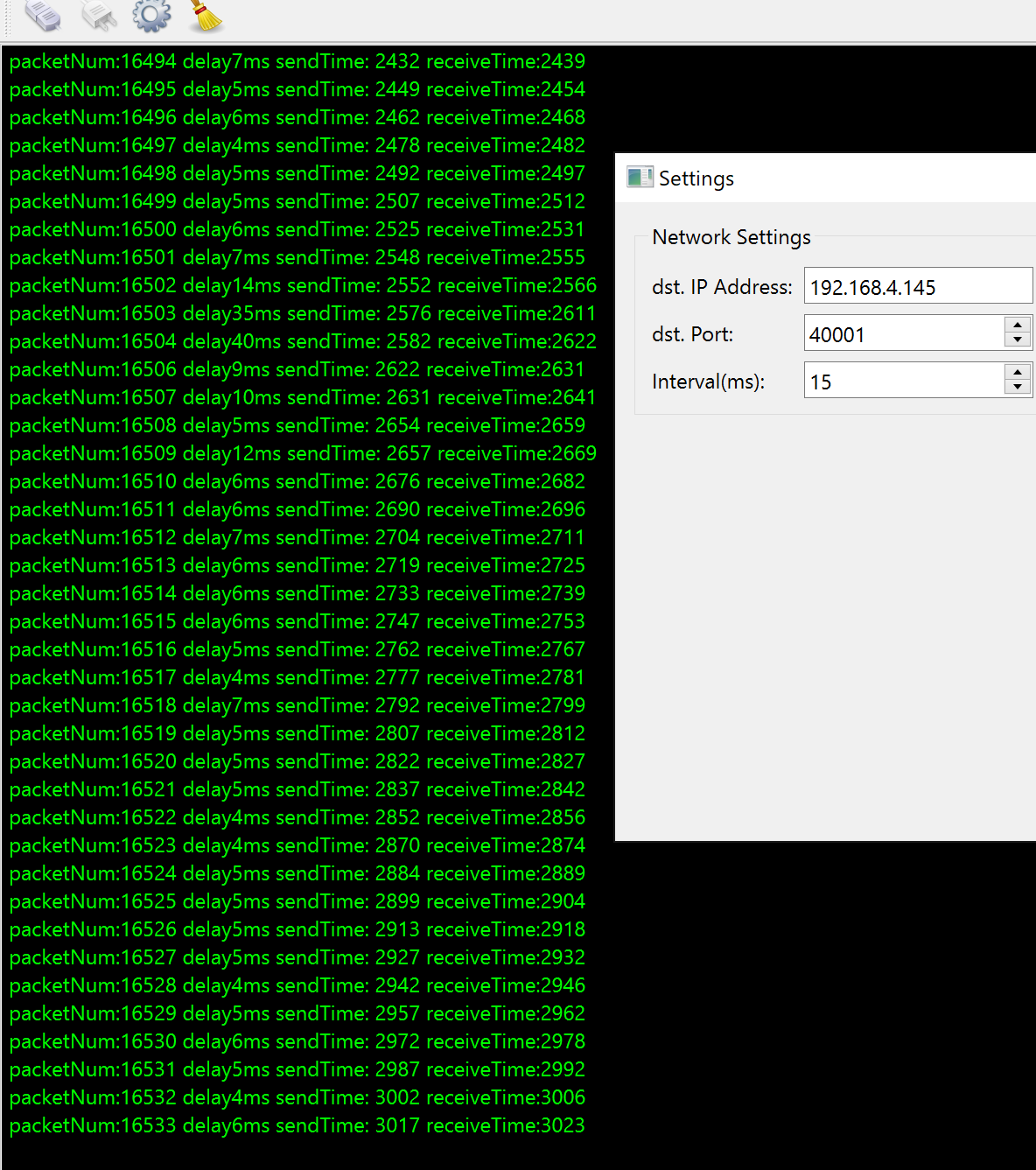
Unicast
およそ5-10msの遅延
測定結果
Broadcast
Unicast
Read more