この記事は2024年8月24日にチーム内Wikiに書かれたレポートを転記したものです.
240824_オムニホイール走行抵抗の計測
目的
加速度指令からホイールごとの推力を計算してFF指令として加算する方式を検討中。
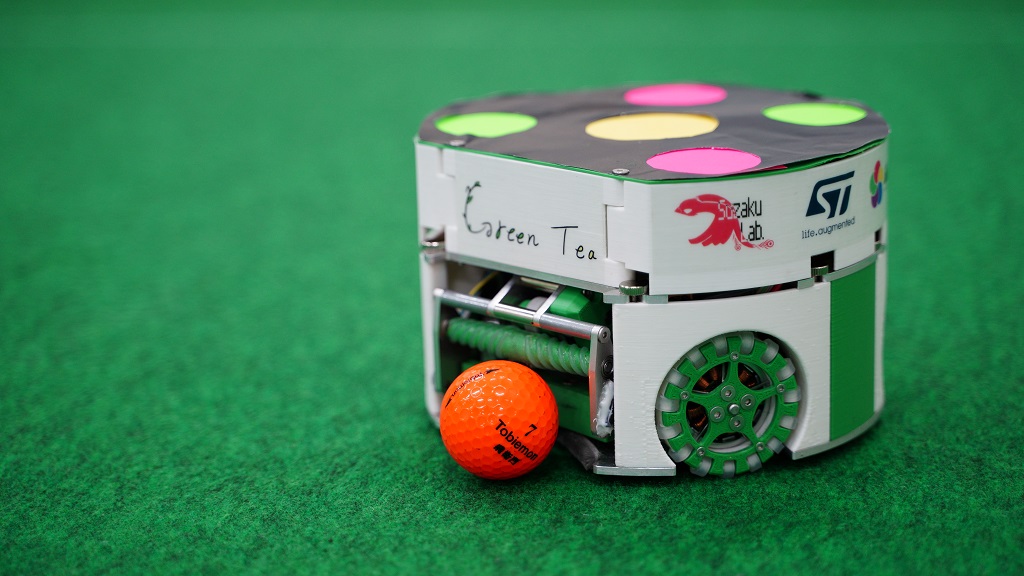
オムニホイールの転がり摩擦(おそらくサブホイールによる)の影響が意外と大きい気がしたので確認する。
結果
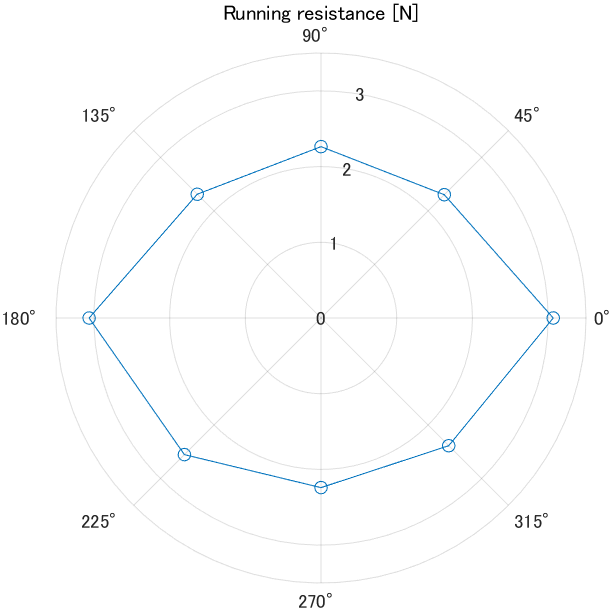
速度0.5m/sにおいて2-3N程度の走行抵抗があることを確認。
前後方向の走行抵抗は,左右方向に対して小さいことがわかる。
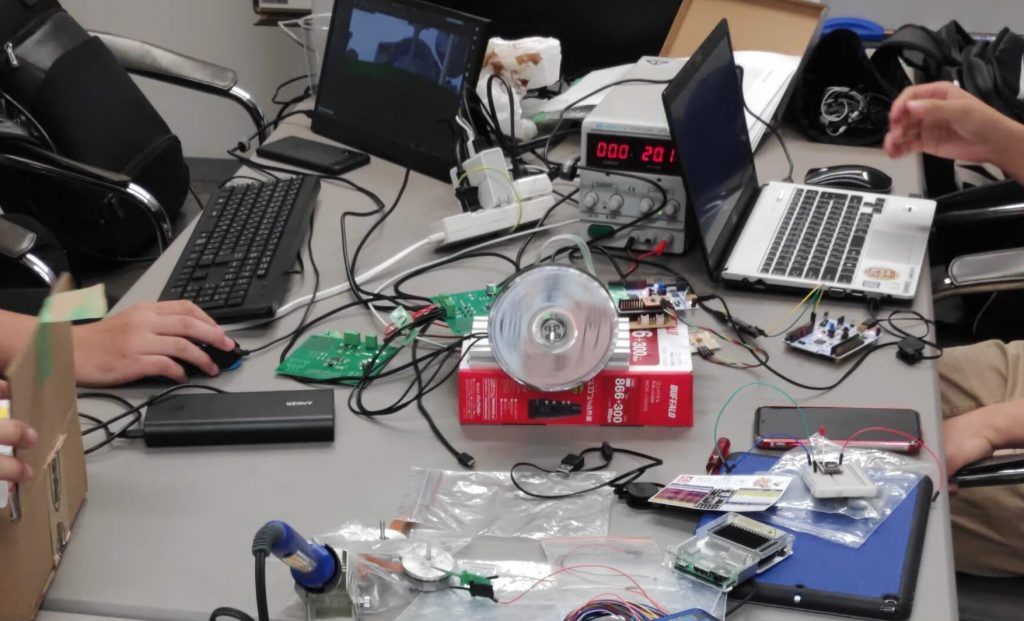
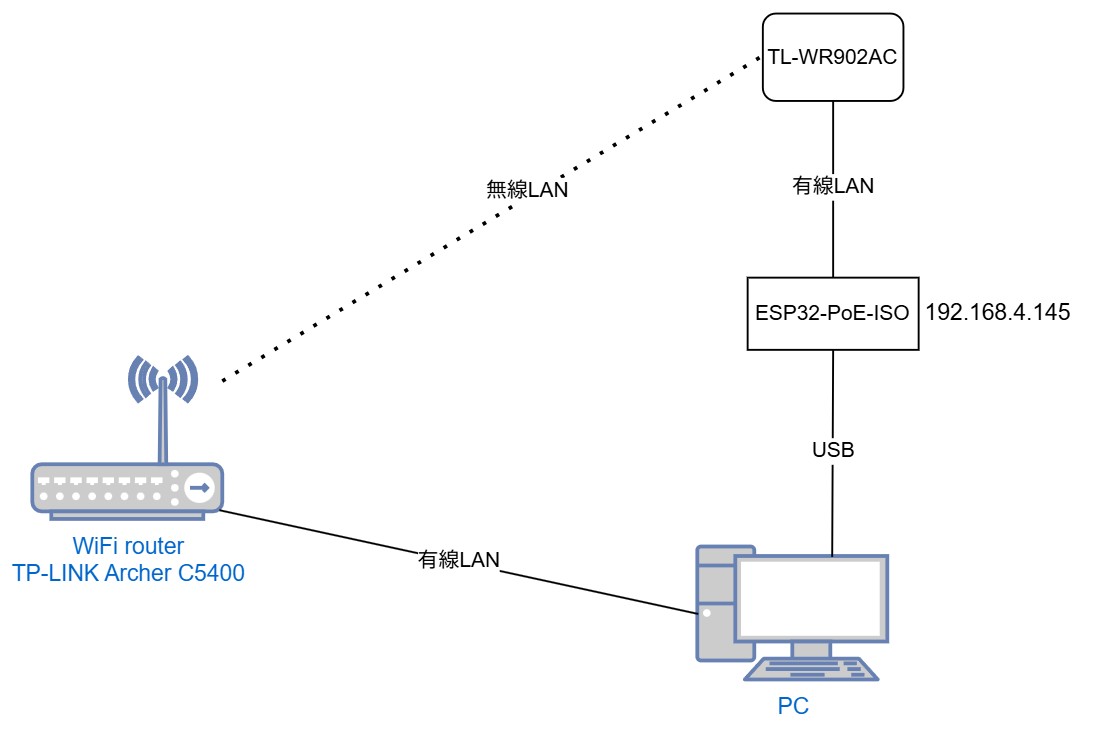
計測方法
ホイールごとの速度制御を行い,
速度指令を0.5m/sに設定。方向は0degから45deg刻みで360deg分実施した。
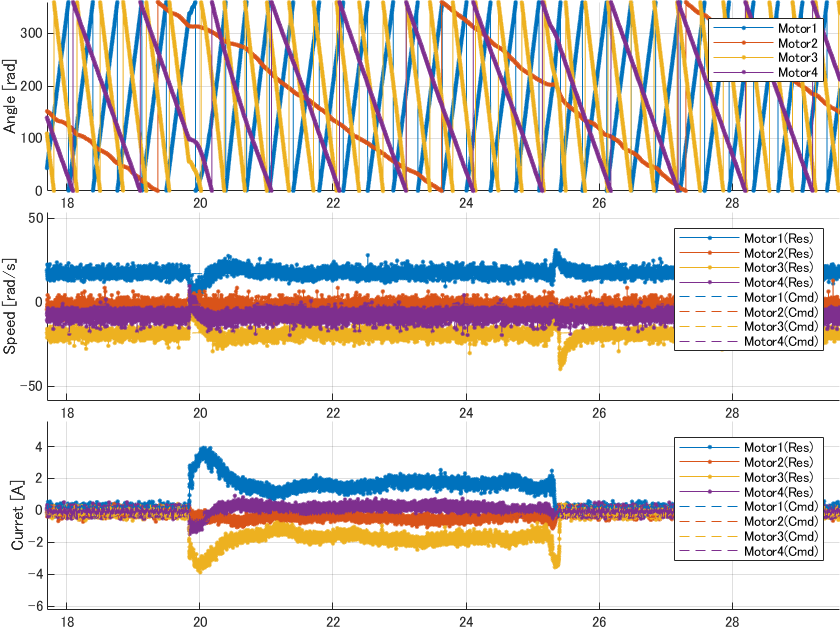
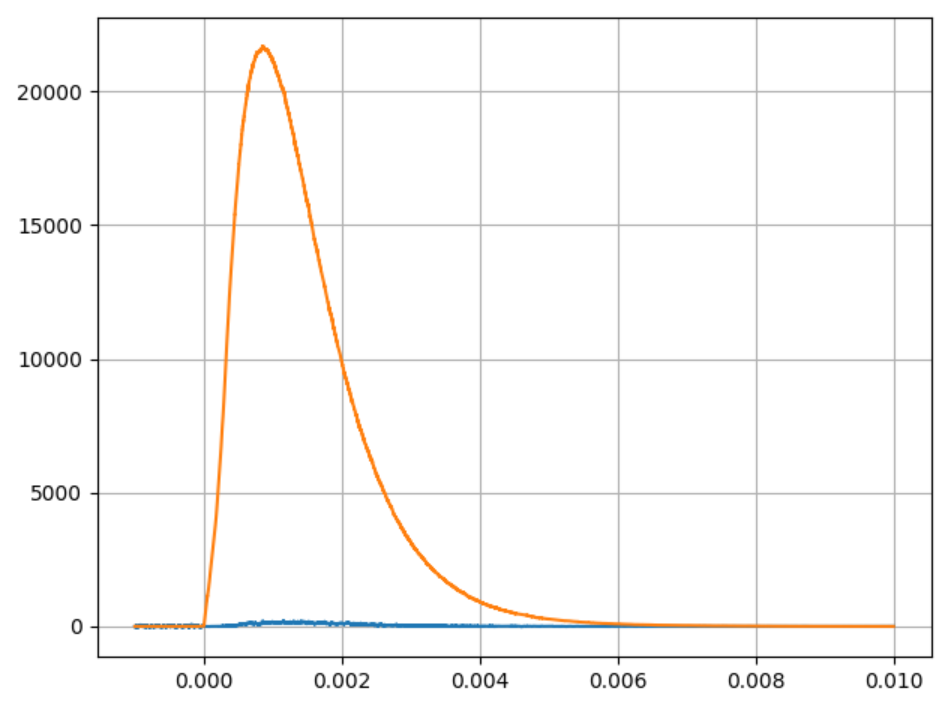
モータ電流を計測し,各モータの電流値からロボット推力を計算し,XY平面におけるノルムを計算した。
下:45deg方向へ走行時のモータ状態量,定常状態と思われる22s-24sの区間の平均値を利用。